<電動アクチュエーターとコントロール装置> 2011年 3月19日 JA1WQF 笠井三男
様々な理由で少し間があきました。
物は出来ており、あれから1週間経ちましたのでそろそろ良いでしょうか?
本日好天でもあり、PCを含め設置動作確認を致しましたところ「まずまず使えそう」でしたのでご報告。
1)今回確認の仰角制御の電動アクチュェーター全容です。
以前とは違い、塗装も済ませPA設置台やカウンターウエイトを取り付ける所も製作済みの写真です。
今の状態はパーキング=90度の状態です。
左の箱は角度検出ポテンションメータその他コントロールを入れています。また黄色いのは今回角度確認の水準器。
2)同じく60度の仰角、この2枚の写真で造作や機構がお分かりかと思います。
60mmのベアリング軸受けで動きはスムーズです、また角度検出の基準はこの固定パイプと可動本体です。
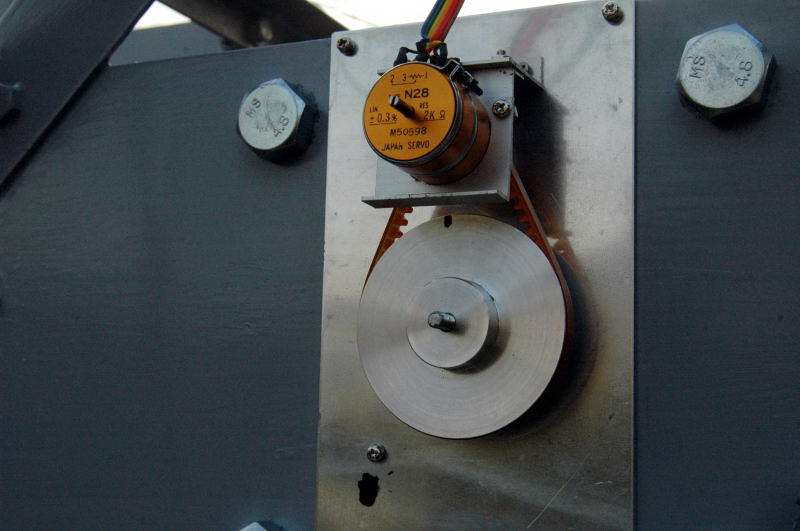
3)角度検出用の導電性プラスチック型ポテンショメーターです、
印字の通り誤差0.3%とあり今回「複数回の計測」で
「使えそう」が分りました。プーリーとゴムベルトで仰角90度を約320度にしてポテンションションメータを動かしています。
理由は1対1ではVRの4分の1(90度)で精度が落ち、4倍ですと90度/360度と管理しにくくなり、そこそこに角度を拡げなるべく
VRの幅を持たせる為です。
写真は角度テスト時の状態で仰角0〜90度までほぼY=AXとフラットに電圧を返してくれました。
ロータリーエンコーダーでやれば良い! スミマセン超アナログ人間でして!!
4)今回作製の方位・仰角コントロールBOXです。
秋月のPICNICを使い、PCコントロールソフトで月や太陽の自動追尾をさせるつもりです。
またそれぞれの角度表示もPC画面表示、そしてまたコントロールです。
アクチュェーター極性切り替え(UP/DOWN)方位ローテーターのコントロールをこのBOXとPCで行います。
方位は取り合えず市販のローテーターで行いますが、精度に不満の場合方位も仰角と同じ様にアクチュェーターで制御できる
様回路は考えて、すでに入れてあります。
このBOX単体でもそれぞれの角度は変えることが出来ます。
5)本日のテスト風景
ANT基部でPCで校正数値入力、実際に動かしてみましたが仰角に関しては1度未満のコントロールが出来そうです。
角度数値はPC上で0.1度は出ますがその単位での確認方法がありませんHi
しかしながら少なくとも0.5度の再現性はありそうです(往復3回のPCと水準器の各角度を目視確認での差)
またこの後太陽の自動追尾も試みましたが気持ちよく追いかけています(ようです)。
6)はたして?
この屋根馬はテストベンチです、ANTやPA機器、その他の調整のためもの。
アクチュェレーター本体はそう高価ではなく(たしか27K?くらい・・?)あとは時間と体力と根性!と工夫で現在あるC社大型仰角
ローテーターより条件の良いものが安価に作れます。(しかし、これ重いですよ)
はたしてANTを載せて10Ghz、24Ghzのシャープなビームに対応できるか分りません、しかし「やらなければ前に進みません」
失敗しても、その時にまた考えれば良い事と思います。
以上YQP皆様には、絶対的な数値や図面などは必要が無いほど単純な物です。
しかし、何も無い所からの構築で、私はある程度時間がかかってしまいました。
何かの参考になれば幸いです。
次週から少し空気の良い所に出稼ぎです・・・・失礼! JA1WQF 笠井三男