|
1296Mhz SSPAとANTその後と仰角電動アクチュエーター試験 |
||||||||||
|
各局お久しぶりです、1296MhzSSPAとパラボラANTに関して中途半端な報告でしたので |
||||||||||
|
次のステップ2.4mDish作業を開始したのを期に写真をUPさせて頂きます。 |
||||||||||
|
|
||||||||||
|
特に今回2.4mパラボラは24Ghzまで使用予定で半値角0.5度以下と鋭く、はたしてAZ,ELの |
||||||||||
|
制御が可能か?・・・で取りあえず市販のELローターでなくアクチュエーターによる制御を考えてみました。 |
||||||||||
|
この部分はパート1と言うことで、機構は完成しましたが制御精度はどうなるか未検証です。 |
||||||||||
|
このアクチュぇーターによる仰角制御は作成にあたり参考になる記事などがあまりなく自己流?で先輩方 |
||||||||||
|
から見ると「おかしなもの」かも知れませんが取りあえず「動きました」の参考程度と言う事でご覧下さい。 |
||||||||||
|
1)1296Mhz3.7mクレーンで吊り上げ 2)やっと上がりました |
||||||||||
|
|
||||||||||
|
3)直下SSPAと水冷機構のラジエーター |
||||||||||
|
折角PAにてUPしたパワーをフィードまでの距離で数十%ロスしている局も多い様で、そこはマイクロを |
||||||||||
|
の「はじっこ」をかじりました経験から「PAはANTの横」が身についており、当初からこのスタイルを考えて |
||||||||||
|
いました。 |
||||||||||
|
ACはトップまで引いています(1200Mhz500W免許状は受領しています) |
||||||||||
|
循環ポンプはケース内蔵していおり水温によりラジエーターは強制空冷です。 |
||||||||||
|
|
||||||||||
|
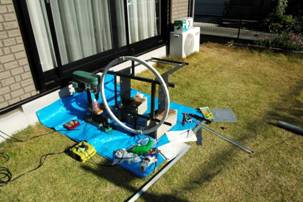
3)2.4mムクパラボラANT仰角用アクチュエーター その1 |
||||||||||
|
手間隙を考えなければコスト的に市販の物より割安で、高精度なものができそう!! |
||||||||||
|
と考えていましたが、なかなかお手本が無くほぼ自己流で作成致しました。 |
||||||||||
|
後で手直しが出来る様に今回溶接ではなくすべてボルト止めでの製作です。 |
||||||||||
|
4)Lアングルをチップソーで切り、穴あけ中 5)大体組み上がったフレームと60mmの軸受け |
||||||||||
|
|
||||||||||
|
6)アクチュエーターを取り付け試験運転 7)同じく仰角ゼロ度位地 |
||||||||||
|
仰角はパーキングポジション90度です。 |
||||||||||
|
|
||||||||||
|
リングの上に2.4m君が乗ります。 |
||||||||||
|
リングの外にアングルが無様に出ているのは、パラボラ精度が我慢出来ない場合6方向に「引っ張る腕」 |
||||||||||
|
(押す)を取り付けるためです。 |
||||||||||
|
年内中に(2010年)仰角回転機構を完成する予定でしたが、現在(12/29)上海で稼ぎ中で |
||||||||||
|
叶いませんでした。 |
||||||||||
|
1月中にはカセグレンタイプで10Ghz,24GhzのANTとして完成させたいですが・・・・・・・。 |
||||||||||
|
これからは少しずつマイクロ波に近いリポートがUPできるかも知れません。 |
||||||||||
|
5Ghz10Ghz24Ghzハイパワー免許書類提出致しました。 |
||||||||||
|
JA1WQF 笠井@上海 |
||||||||||